Newton 4
- 対応プラットフォーム
- 対応OS
After Effectsでリアルな物理演算を実現し、2Dレイヤーを現実世界のオブジェクトのシミュレーションを実現するプラグイン



After Effectsでリアルな物理演算を実現し、2Dレイヤーを現実世界のオブジェクトのシミュレーションを実現するプラグイン
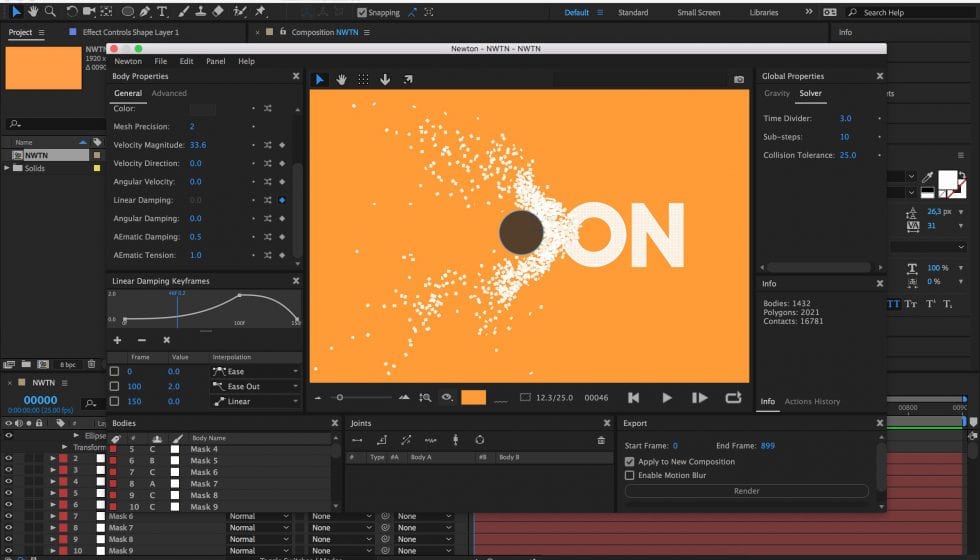
Newton 4はAfter Effectsでリアルな物理演算を実現し、2Dレイヤーを現実世界のオブジェクトのシミュレーションを実現するプラグインです。
Newton は2Dのコンポジションレイヤーを、現実の環境下で影響を及ぼし合う固定された物体として認識します。各レイヤーは、密度、摩擦、弾力、速度、そして重力などの設定が可能。テキスト、マスク、シェイプなどへの物理シミュレーションが行えます。
バージョン4のリリースでは Waterlike(オブジェクトの浮遊をシミュレート)とTriggers(オブジェクトが衝突とアニメーションをトリガー)、Teleportation(オブジェクトがポータルをすり抜けて指定したポイントにテレポート)、Comp Walls(コンポジションの境界をウォールに変換)、Grenade(オブジェクトをグレネードにしてプロジェクトに爆発的なダイナミクスを導入)などの新機能が追加されました。
Samples Browser(サンプルブラウザ)からは厳選されたデモシーンを再現することができます。これらのテンプレートから高度なテクニックを学んだり、設定済みのエフェクトでプロジェクトを始めるのに最適です。
Waterlike機能を利用することで、オブジェクトが水を介したインタラクティブなシミュレーションを実現します。例えばオブジェクトが水の抵抗で減速するドラッグエフェクトや、オブジェクトが目に見えないバリアを感知して反応するアニメーションなどを作成することができます。
Triggermaticはオブジェクトが衝突するとアニメーションが起動するシミュレーションです。どんなオブジェクトでもトリガーになり、アニメートされたオブジェクト自体もトリガーとして扱うことできます。さらにやサイクルやピンポン、オフセット、コンティニューなどの多彩なループオプションを活用してアニメーションの流れをシームレスに維持することができます。
Teleportationを利用することでオブジェクトがポータルを通り抜け、指定したポイントに出現するテレポートエフェクトを実現します。あらゆる要素をポータルに変換できるほか、コンポジションの境界をループするオプションも用意されているため、遊び心たっぷりに空間のルールを無視したアニメーションを制作することもできます。
コンポジションのエッジを静的な壁や、Teleportation(テレポート)のポータルとして利用することができます。コンポジション自体をインタラクティブな境界線として利用し、プロジェクトに興奮と創造性を加えましょう。
新に搭載されたGrenade(グレネード)機能を利用することで、プロジェクトに爆発的なダイナミクスを導入することができます。タイミングや強さを自在にコントロールして、さまざまなエフェクトを作り出せます。インパクトゾーンを直接プレビューできるので、正確でドラマチックな結果が得られます。
ヌルレイヤーのサポートやプロパティのハイライト、自動保存、ランダマイザー、コンタクトのエクスポート、シーンのスナップショット、アクションの履歴など、Newton 4を利用するうえで便利な機能が新たに追加されました。

Distance Joint |

Pivot Joint |
|

Spring Joint |

Wheel Joint <New> |

Blob Joint <New> |
※対応するOSバージョンにつきましては、「After Effects 必要システム構成」をご参照ください。
プラグインのテクニカルサポート提供は、Adobe社の「必要システム構成」内でのご利用が前提となります。Adobe社の「必要システム構成」で動作が保証されない環境でプラグインを使用した際に発生するトラブルへのサポート提供は致しかねますことご了承ください。
AESCRIPTS社製品 MANAGER APP経由のデモ版インストール方法
aescripts社製品は、プラグインやスクリプトのインストールとライセンス管理ソフト、manager appを利用してデモ版をインストールすることができます。
※manager appの利用にはaescripts + aeplugins 社のアカウントが必須となります。aescripts + aeplugins社 アカウント作成方法をご参照のうえアカウントを作り、manager appをご利用ください。
製品のインストーラーはデモ版と正規版を兼用しています、正規ライセンスの認証を行わない場合デモ版として製品の一部をお試しいただけます。
Newton 4 デモ & 正規版 (WINDOWS版とMAC版を兼用)
※製品のインストーラーは、デモ版、正規版を兼用します。ライセンスの認証を行わない場合、エクスポートが25フレームに限定されます。
Newton 4やPastiche2、Connect Layers ProなどMotion Boutiqueの7製品をセットにしたお得なバンドル
点、線、面で作る3Dパーティクルジェネレーター
レイヤー群のコラージュとアニメーションを実現するAfter Effects専用プラグイン
選択した任意のレイヤーを繋いでラインを生成し、自在なアニメーションを実現するAfter Effectsプラグイン
GPUアクセラレーションに対応し高速処理を実現するAfter Effects専用のグロープラグイン
ベクターアイコンやフォント、平面レイヤーを大量生成!Motion Boutique の Pastiche と相性抜群の After Effectsスクリプト
14種類のユーティリティーツールを収録するAfter Effectsプラグイン
ステレオグラムを生成するAfter Effectsプラグイン
 Piston Joint
Piston Joint